Wheels revolutionized how humans— and later robots — moved through the world.
Isn’t it High Time for Robots without wheels?
Wheels revolutionized how humans — and later robots — moved through the world. But as the terrain of our ambitions changes, so too must our approach to mobility.
Today, we ask: Isn’t it time we looked beyond wheels?
They will be prevalent for quite a long time as using wheels offers simple control and diagnosis.
“The success of wheeled robots is largely due to their simplicity in predictable environments.” —IEEE Spectrum, 2020
For a long time, wheels have been a great friend of mankind, simplifying our tasks, whether transporting goods or ourselves.

When wheels were revolutionary. Now, they’re just… expected.
But the real world isn’t always flat. As robots venture beyond factory floors — into disaster zones, rugged terrains, and even other planets — wheels show their limits.
In today’s robotics landscape, wheeled robots, tracked robots, and legged robots coexist, with the choice of design often dictated by environmental conditions and specific requirements. Let’s delve into why the era of exclusive reliance on wheels might be coming to an end and explore the potential — and challenges — of alternative mobility systems.

When every terrain is alien, should our solutions still be terrestrial?
Robots have transformed countless industries, managing everything from factory production to autonomous deliveries. The large dominance of wheeled robots stems from their remarkably simple design along with their outstanding ease of control. Exploring disaster zones, challenging terrains and extraterrestrial environments is analytically important and this necessitates the development of revolutionary and progressively important mobility methods. Wheeled robot design flaws can be examined, along with the possible benefits of exploring non-wheeled robot alternatives.
The Dominance of Wheeled Robots
In robotics, many wheeled designs have become synonymous with large reliability along with meaningful efficiency. Their outstanding simplicity enables considerably easier control, resulting in substantially lower energy consumption on flat surfaces and greatly more straightforward diagnostic processes. Wheeled robots are used in automated warehouses and service industries and also in homes, such as for robotic vacuum cleaners.
Reference:**IEEE Spectrum’s numerous articles on mobile robotics have highlighted that the success of wheeled platforms is largely due to their energy efficiency and simplicity in predictable environments (IEEE Spectrum, 2020).
Limitations on Challenging Terrains:
Many wheeled robots are used in various applications; however, these machines experience meaningful difficulties traversing uneven or unpredictable terrains. Many challenging environments, including exceptionally hazardous disaster sites, extremely rugged and rocky landscapes, and a large number of densely cluttered indoor areas, present large difficulties that wheels alone cannot readily surmount. Legged, tracked and other alternative robots offer particular advantages here.

The next frontier doesn’t roll forward, It walks… and even runs
The Case for Robots without Wheels
Exploring Alternative Mobility Solutions: Legged robots, aerial drones, and climbing robots represent promising alternatives to the conventional wheeled designs. These systems are often inspired by nature — mimicking the locomotion of animals or insects — to tackle environments where wheels falter.
- Legged Robots: Legged robots, like Boston Dynamics’ Spot, showcase the ability of machines to traverse stairs, navigate rough terrain, and even regain balance after unexpected disturbances (Boston Dynamics, 2021).

Nature walks. Now robots do too.
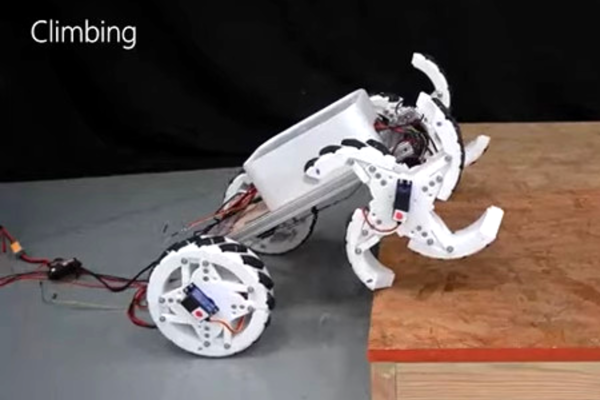
- Aerial and Climbing Robots: Aerial and climbing robots offer innovative solutions for inspection, search and rescue, and surveillance in locations that wheeled vehicles cannot access.
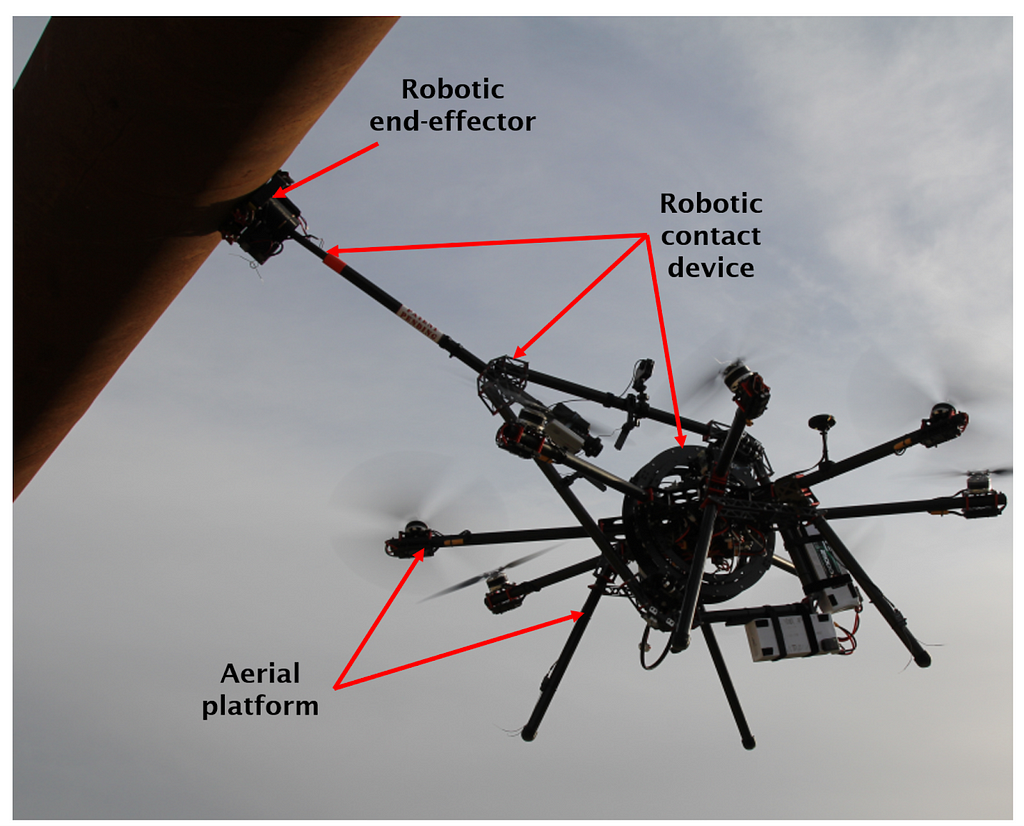
This isn’t surveillance. It’s aerial manipulation at work.
- Underwater robots: Underwater drones are becoming the main players in marine exploration, environmental monitoring, and infrastructure inspection. Designed to be able to withstand challenging aquatic environments, these drones can navigate through complex underwater terrains. Projects like the BlueROV2 have set new standards for underwater robotics by offering both versatility and resilience. (Blue Robotics, 2020).
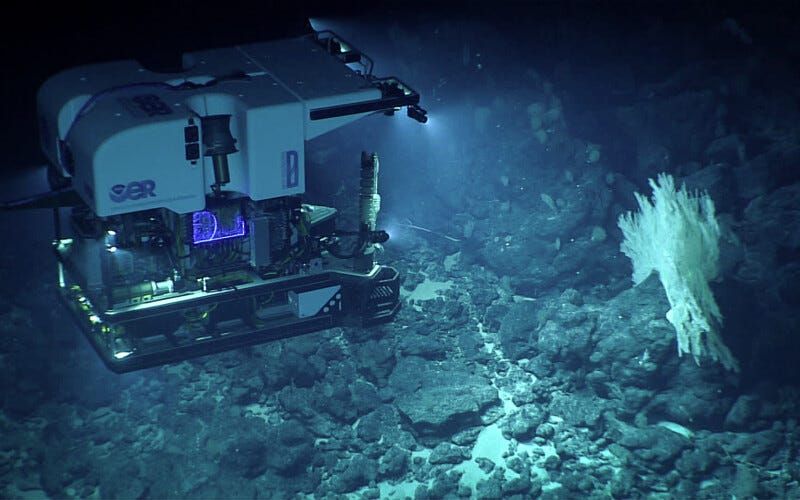
Why settle for paths when we can chart new frontiers?
Legged robots, like Boston Dynamics’ Spot, showcase the ability of machines to traverse stairs, navigate rough terrain, and even regain balance after unexpected disturbances (Boston Dynamics, 2021). Aerial and climbing and underwater robots offer innovative solutions for inspection, search and rescue, and surveillance in locations that wheeled vehicles cannot access/traverse.
Technological and Practical Challenges
Engineering and Stability
Developing robots that don’t rely on wheels presents several challenges. For instance, legged robots need advanced control systems to keep their balance and stability, particularly on uneven surfaces. The difficulty of mimicking natural movement using actuators and sensors frequently leads to greater energy use and more complicated designs.
When stairs turn into streets, this bot keeps rolling
Cost and Manufacturing
The investment in research and development for non-wheeled robots is generally much higher. These systems require advanced materials, intricate algorithms, and precise mechanical components, all of which can increase manufacturing costs and make maintenance more complicated.
Reference: MIT Technology Review has explored the financial and engineering hurdles of advanced robotics, noting that while the potential is enormous, the cost of reliable implementation remains a major barrier (MIT Technology Review, 2020).
Innovations and Future Trends
Cutting-Edge Examples and Research
The field of robotics is advancing rapidly. Organizations such as Boston Dynamics, along with research institutions around the globe, are developing legged robots that challenge the limits of technology. Hybrid designs that integrate various modes of movement, such as wheels and legs(like Unitree), are becoming practical options for real-world uses.

Why choose between wheels and legs — when you can have both?
Convergence of Technologies
The field of robotics is advancing rapidly. Organizations such as Boston Dynamics, along with research institutions around the globe, are developing legged robots that challenge the limits of technology. Hybrid designs that integrate various modes of movement, such as wheels and legs, are becoming practical options for real-world uses.
Reference: Research papers in the Journal of Field Robotics have documented significant progress in sensor fusion and AI control systems that enhance the performance of legged robots (Journal of Field Robotics, 2021).
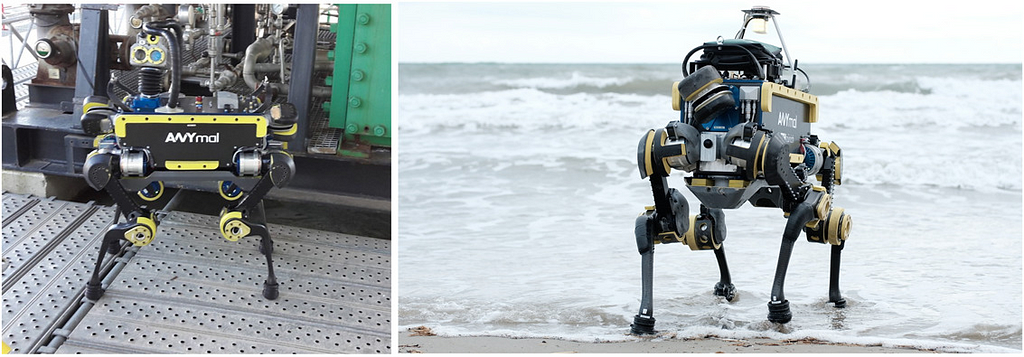
ANYmal doesn’t ask ‘where’ — it asks ‘when?
The world of robotics is no longer just rolling forward — it’s leaping, climbing, flying, and adapting in ways once reserved for science fiction.
Pioneers like Boston Dynamics and global research labs are pushing beyond the wheel. Today’s robots are being designed to walk like animals, climb like insects, and fly like birds. Some even do all three. We’re entering an era where mobility isn’t limited by smooth floors or predictable paths.
Yes, wheeled robots have done wonders — on factory floors, in hospitals, even on Mars. But when the terrain gets wild, the wheels start to wobble. Think: stairs, rubble, forests, collapsed buildings. This is where legs, wings, and hybrid designs come in — not just as sci-fi flair, but as real solutions to real problems.
From hybrid bots that roll and walk, to drones that land and crawl, the future of movement is becoming multi-modal — and that’s not just cool, it’s necessary.
Why? Because the challenges we face — from disaster response to planetary exploration — aren’t flat. They’re dynamic, unpredictable, and sometimes downright hostile. And if robots are to help us navigate these challenges, they need to move with purpose, agility, and resilience.
By looking at our historical dependence on wheels alongside the exciting advancements in alternative robotics, we can envision a future where robots are built to adapt to various challenges. This serves as a reminder that although wheels have taken us a long way, it may be time to explore new avenues.
Whether you’re building, researching, or just curious, this is the moment to reflect on where robotics is heading.
Share your thoughts and let’s continue to push the boundaries of robotic mobility beyond all limitations!
