Quad-Spider: The 4-legged bluetooth Spider
Introduction: Sharpening the Axe Before the Swing
In the spirit of the age-old lumberjack analogy, this project wasn’t about rushing to build a robot. Instead, it was a meticulously pre-planned engineering experiment, focusing not only on functionality but on modularity, control theory, and real-time human-robot interaction.
Over the summer, I built Quad-Spider, a Bluetooth-controlled quadruped robot that responds to text-based motion commands from a custom Android application created using MIT App Inventor. This article is a deep dive into how I went from concept to prototype, and how I iterated across hardware limitations, software design, and control stability.
Mechanical and Electrical Framework
Robot Chassis & Motion
- Leg Configuration: 4 legs × 3 DOF = 12 degrees of freedom
- Servos: 12 × SG90 servo motors (PWM-controlled)
- Structure: Lightweight acrylic chassis, designed for symmetry and center-of-mass alignment
- Power Source: 11.1V 2200mAh LiPo Battery regulated via a buck converter to 5–6V for stable servo operation
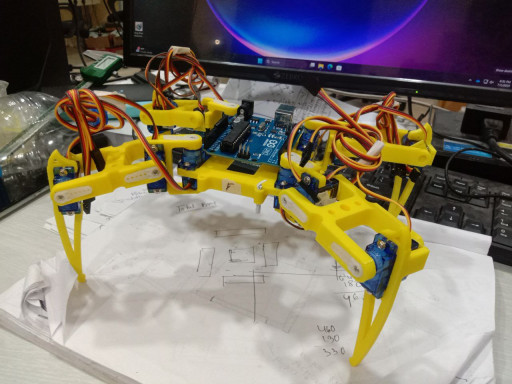 Spyder model
Spyder model
Pin Mapping
- Servo Control Pins: Digital Pins 2–13 (1 per servo)
- Bluetooth TX/RX: Pins 10 (RX), 11 (TX) via
SoftwareSerial - Arduino Board: Arduino Uno or Nano
Bluetooth Communication Architecture
Module: HC-05 Bluetooth Serial Module
- Baud Rate: 9600
- Voltage Divider: 8kΩ & 12kΩ resistors on RX line for 5V → 3.3V compatibility
- Communication Protocol: UART serial interpreted by Arduino and parsed via custom logic
Command Structure
Simple line-based protocol:
"w 5\n" // Walk forward 5 steps
"s 1\n" // Sit once
"k 3\n" // Shake leg gesture 3 times
Each command consists of a keyword and step count, terminated with \n.
Software Stack on Arduino
Yes, you read that right… Instead of a brain for high-end compute, we decided to use this one instead.
Core Libraries
Servo.hfor PWM controlFlexiTimer2.hfor periodic timed control of all 12 servosSoftwareSerial.hfor Bluetooth handling
Servo Timing & Synchronization
FlexiTimer2used at 20ms intervals (50Hz PWM)- Smooth motion via step-by-step interpolation
- Avoided servo jitter and overloads with staggered updates
Command Parsing Logic
Dropped SerialCommand in favor of memory-efficient manual parsing:
1
2
3
4
5
6
7
8
9
if (BTSerial.available()) {
char c = BTSerial.read();
if (c == '\n') {
parseCommand(buffer);
buffer = "";
} else {
buffer += c;
}
}
This allows precise one-line-at-a-time parsing with low memory overhead.
📱 The Custom App – Built with MIT App Inventor
Features
- Clean UI with command buttons (Walk, Sit, Wave, etc.)
- Input box for custom step count
- Real-time Bluetooth response display via .ReceiveText
- Handles newline-based protocol and shows only the last line for performance
Workflow
- On button click: send “cmd step\n” string
- Use .BytesAvailableToReceive and .ReceiveText(-1)
- Split at \n, select last item from list
- Display in label or debugger box
Design Thinking & Challenges
Constraint-Aware Coding
- 2KB SRAM limit on Arduino Uno
- Used lean memory buffers and avoided dynamic allocations
- Pin mapping maximized usage without overlap
Power Management
- Buck converter set to ~6V output
- Isolated logic (Arduino) from servo power to prevent resets
Gesture Sequencing
- Each gesture was defined as a series of angles
- Step interpolation added to each transition
- Reduced jerkiness and improved accuracy
Demo & Results
Visit the GitHub Repo to see:
- Arduino code
- App Inventor .aia file
- Full circuit diagrams
- Servo math logic and step models
- Build pictures and videos
Conclusion: A Spider With a Brain
This robot is not just about crawling, it is about interpreting instructions, executing gait patterns, and wirelessly interacting with a user. It blends mechanical kinematics, embedded systems, and a mobile interface for real-world human-robot communication.
What began as an idea during summer became a fully functional interactive robot built from scratch using careful planning and relentless debugging.
Feel free to fork the code, use the hardware map, or even integrate your own AI/ML layer for gesture prediction. The world of robotics is yours to spider-crawl into! 🕷️🤖